

Un des changements de cette version est plus architectural : tout le code de support des versions précédentes a été migré dans un nouveau module, APEX Legacy. Il suffira de le charger pour que les données des versions précédentes soient lisibles (au lieu de charger un module de support par module d’APEX, comme APEX Clothing Legacy ou APEX Destructible Legacy).
Les modules Destruction et Clothing supportent désormais les mandataires d’affichage (render proxies) : les données nécessaires à l’affichage sont désormais stockées dans un objet séparé, qui peut être détaché des acteurs. Ainsi, dans un contexte multifil, le moteur physique peut très bien avoir des acteurs déjà supprimés car plus nécessaires, alors que toutes les données ne sont pas encore affichées : en détachant cet objet de rendu, les données sont gardées.
Destruction
Du côté artiste, le module de destruction propose désormais des groupes comportementaux. Ainsi, toute une série de paramètres (seuil de dommage, propagation des dommages, densité, etc.) seront stockés au niveau d’un groupe, au lieu de chaque débris.
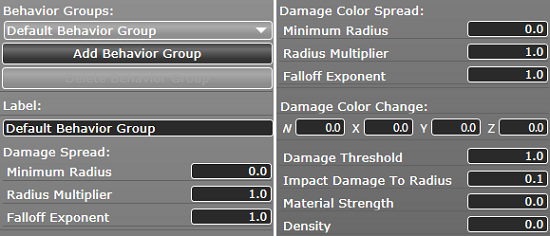
Le paramètre de propagation des dommages (damage spread) est une triplet contenant un rayon minimum, un multiplicateur de rayon et un exposant de décroissance, qui remplace le paramètre de rayon de dommage. Quand un dommage est causé à une structure destructible, elle possède un certain rayon (qui peut être nul dans le cas d’un point) ; une fois multiplié et additionné au rayon minimum, cette valeur – appelée rayon maximum – indique la distance après laquelle la structure n’est plus impactée par le dommage ; tous les points entre ces deux rayons sont touchés de manière dégressive (selon une loi précisée par l’exposant de décroissance), tous les points dans le rayon minimum reçoivent un dommage maximal.
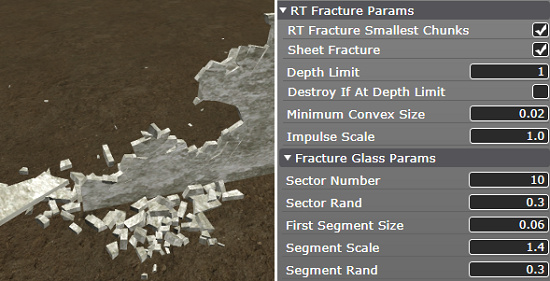
Le système de fracturation en temps réel est désormais disponible, après une série d’annonces (comme une démo de couplage avec des fluides ou des algorithmes). L’effet semblera alors plus naturel et plus détaillé, il dépendra plus fortement du point d’impact et de la force appliquée que de la fracturation précalculée. Il faut noter que, pour APEX 1.3, la fracturation ne se fera que comme du verre.
Tissus
Le solveur amélioré disponible dans PhysX 3.3 est désormais à la base des simulations de tissus, ils supportent donc les autocollisions, les collisions avec d’autres objets de tissus, ainsi que des collisions (plus limitées) avec le décor.
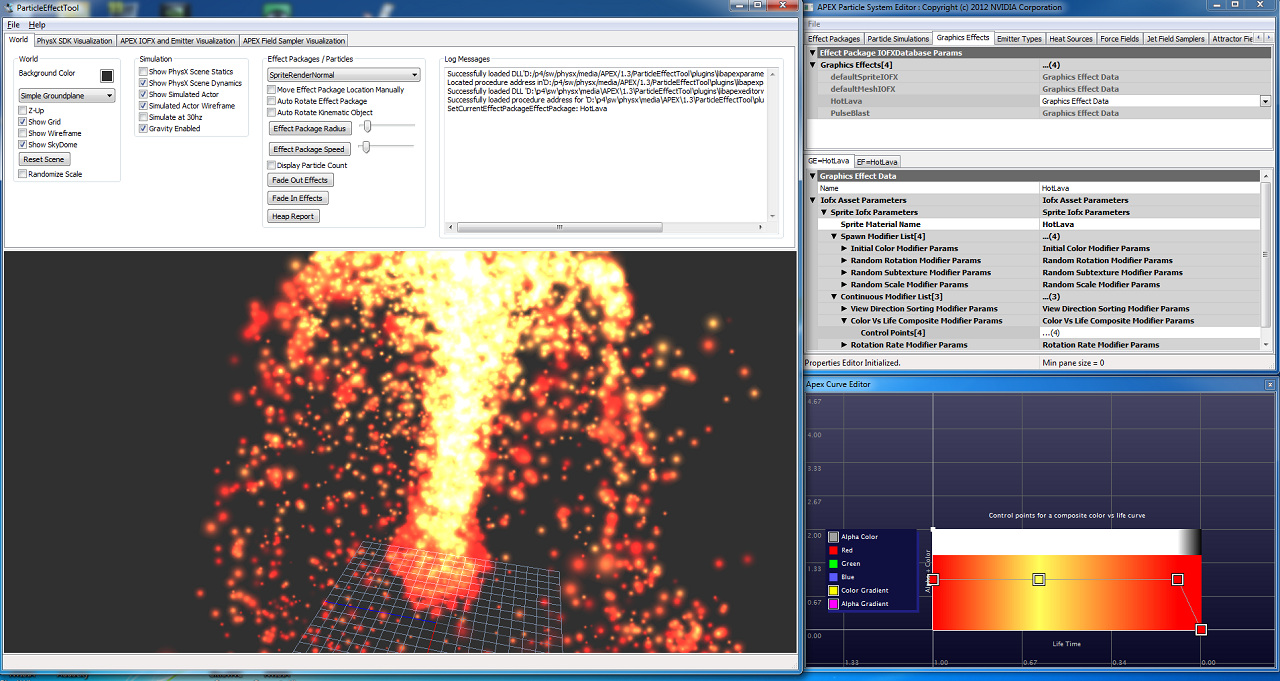
Particules
Les différents modules liées aux particules (APEX Basic FS, Basic IOS, Emitter…
Un nouveau type d’entité facilite les interactions entre les particules et la turbulence, en liant ces acteurs et données en un seul acteur manipulable en temps réel (des émetteurs de particules, une grille de turbulence, un champ de force, une source de chaleur et d’autres peuvent être ainsi fusionnées). Chacun des effets individuels peut avoir des caractéristiques temporelles différentes, comme une durée ou des compteurs ; de même, un système parent-enfant est déployé, ce qui fait que le déplacement de l’acteur racine déplace tous les enfants.
Source : http://physxinfo.com/news/12024/apex-1-3-released-features-first-iteration-of-real-time-fracturing/
Billet original
Vous avez lu gratuitement 3 673 articles depuis plus d'un an.
Soutenez le club developpez.com en souscrivant un abonnement pour que nous puissions continuer à vous proposer des publications.
Soutenez le club developpez.com en souscrivant un abonnement pour que nous puissions continuer à vous proposer des publications.